 平安财经网
平安财经网一种新的非完整欠驱动并联机构的合成方法
上海大学的研究人员开发了一种新的方法来实现非完整欠驱动并联机制的类型合成。他们的方法在Acta Astronautica发表的一篇论文中提出,可以帮助开发用于在轨维修作业的太空机器人。
每年大约有100颗卫星被发射到太空,以监测地球上的活动,并提供通信或GPS系统等服务。“在轨维修”一词是指旨在维持轨道上的空间系统的各种操作,这些操作可能需要在部署后对航天器进行维修,组装,加油和升级。
将来,太空机器人可以帮助快速有效地完成在轨维修任务,而无需人工协助。基于特定的机械和物理原理,非完整并联机器人是空间机器人中特别有前景的方法。
在物理学和数学中,非完整系统是一个系统,其状态取决于实现它的路径。在机器人技术中,非完整系统在移动机器人的运动规划和反馈线性化的背景下获得了特别的相关性。
“欠驱动的非完整并联机制是并行空间机器人的一个新方向,体积小,重量轻,成本低,能耗低,灵活性高”,研究人员在他们的论文中写道。
并行机制开发中的一个关键问题是类型合成,其涉及找到产生具有指定自由度(DOF)或运动模式的移动平台的运动的所有可能类型的并行机制。并行机制的类型合成的系统方法可以分为两大类:具有指定数量的DOF的方法和具有指定运动模式的方法。
“现有的类型合成方法不能产生欠驱动的非完整平行机制,并且在平行机制中引入了非完整球形对,”研究人员解释说。“本文致力于类型合成具有球形运动模式的欠驱动平行机构,伴随着在球形运动模式的平行机构中生成非完整球形对。”
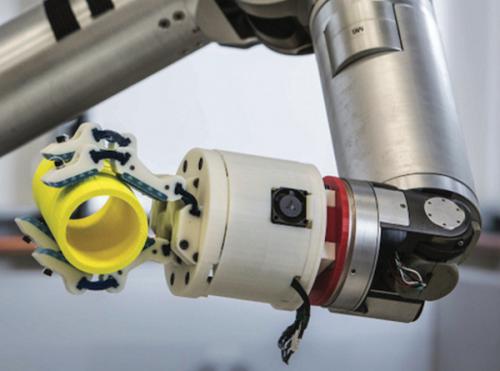
在他们的研究中,研究人员提出了一种新的滚球接触方法,以及具有球形运动模式的平行欠驱动机制的非完整球形对的生成方法。他们开发的非完整球形约束机制简化了空间结构,提高了球形非完整约束结构的精度。
研究人员使用空间机器人的非完整欠驱动关节机制进行在轨维修操作的例子,展示了他们的方法如何应用于现实生活中。将来,这种技术可用于开发重量更轻,灵活且更便宜的空间机器人,并降低能耗。