 平安财经网
平安财经网OrigamiInspired机器人抓手
由麻省理工学院和哈佛大学的研究人员开发的一种新的软机器人抓手可以提升当前类似技术的更广泛的物体,包括其重量的100倍。目前在工业应用中通常使用的机器人夹具往往是刚性的,并且只能在没有任何直观能力的结构化环境中工作。随着麻省理工学院和哈佛大学的研究人员开发出一种柔软但特别强大的软抓手机器人,这种情况很快就会发生变化,这种机器人的重量可以达到其重量的100倍。
机器人 - 麻省理工学院计算机科学与人工智能实验室(CSAIL)和哈佛大学的John A. Paulson工程与应用科学学院合作,是一种折纸式的锥形结构,在物体上坍塌,类似于金星捕蝇草植物捕获它的猎物。Atlantic Design&Manufacturing是东海岸领先的设计工程师贸易展,提供最新的3D打印,自动化和CAD / CAM软件,包括FedEx,GE Appliances,Procter&Gamble以及其他数百种软件。
目前存在的橡胶机器人夹具柔软且有弹性,允许它们拾取诸如葡萄,盒子甚至空水瓶之类的物品。然而,它们通常仅限于在没有太多重量的情况下拾取物体。麻省理工学院教授Daniela Rus表示,这种新型夹具不太受限制,能够抓住并拾取大量物体,包括汤罐,锤子,酒杯,无人机,以及像一块西兰花一样细小的东西。 ,CSAIL主任。
“以前解决包装问题的方法只能处理非常有限的物体类别 - 非常轻的物体,或符合箱子和圆柱体等形状的物体,”她说。“但是凭借Magic Ball夹具系统,我们已经证明我们可以为各种各样的物品(从葡萄酒瓶到西兰花,葡萄和鸡蛋)进行取放任务。换句话说,重物和轻物体。精致或坚固的物体,或具有规则或自由形状的物体。“
实际上,新的机器人抓手为这些类型的机器可以做什么设置了不同的条件,麻省理工学院和CSAIL的研究人员处于这类研究的最前沿。事实上,罗斯说她有一天希望创造一个“能为你自动包装杂货的机器人”,她说。
折纸的力量
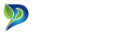
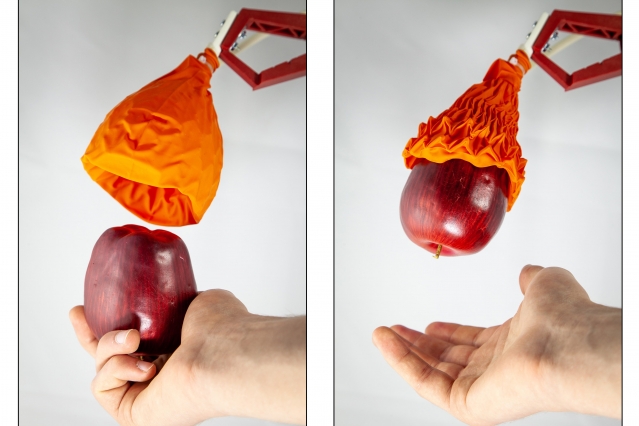
研究人员使用了与之前在夹子设计中使用的不同形式的机器人形状,灵感来自于所谓的“折纸魔术球”,这是日本纸张折叠艺术中的一种设计。研究人员说,这种形状 - 锥形,中空和真空供电 - 允许设备包裹整个物体并成功地拾取它。
机器人抓手有三个部分 - 基于折纸的骨架结构,用于包住结构的气密皮肤和连接器。为了制造这些零件,研究人员使用了一种机械橡胶模具和一种特殊的热收缩塑料,可在高温下自行折叠。
为了测试夹具在不同物体上的强度,研究人员将其与标准机器人配对。他们发现抓手可以抓住并抬起70%直径的物体,这使得它可以拾起并保持各种软食而不会造成损坏。它还可以捡起重达4磅的瓶子。
CSAIL和哈佛大学的John A. Paulson工程与应用科学学院的联合博士后李曙光表示,其性能将使其对亚马逊这样的船公司具有吸引力,这些公司需要在仓库中采用这种自动化方式来获取“微妙或不规则”他说,“目前用手指式和吸盘式手柄不能做到这一点。”
“吸盘无法拾取任何带孔的东西 - 而且它们需要的东西比柔软的手指夹持器强得多,”李说。
目前,折纸式夹持器最适用于瓶子或罐子等圆柱形物体,这也意味着它非常适合用于工厂的生产线。但是,它确实有其局限性;研究人员说,例如,夹子拿起一些平坦的东西,如三明治或书,这将是一个挑战。
研究人员表示,该团队计划继续努力,通过增加计算机视觉来解决夹具目前在角度和方向上遇到的一些问题,他们说这可以让抓手“看到”并能够抓住物体的特定部位。